三维点云机器学习检测定位圆心,三维圆检测,拟合轴线(基于open3d和python)
”机器视觉 点云 三维视觉 三维检测 圆拟合“ 的搜索结果
圆筒端面点云数据,来源于机器视觉实际项目,由高精度梅卡曼德结构光相机拍摄。可用来进行三维视觉检测练习,用于三维圆检测,距离聚类,异常点剔除,大平面检测
结构光平面标定是结构光三维视觉测量中的重要环节。传统的标定方法需要昂贵的设备,效率低下,步骤复杂。提出了一种新的三维视觉系统中结构光平面的标定方法。该方法仅使用一个简单的二维平面靶标,在保证靶标与结构...
针对数据排列无序、随机缺失及伴随白噪声等问题,提出一种基于因子分析法的三维点云配准方法。将点云数学模型扩展为正交因子模型,从而将点云的配准问题转换为对模型参数的求解问题;采用高斯混合模型对点云进行拟合,并...
以双目立体视觉理论为基础, 采用基于模仿人眼的双目单视面所给出的规律, 设计出一套简单的三维重建算法。为了利用双目单视面的原理, 采用两个光轴交叉放置的相机来拍摄物体。对所得的两幅图片进行坐标转换, 将图像...
下面是opencv和pcl的特点、区别和联系的详细对比表格。OpenCV和PCL虽然有一些相似之处,但它们的应用场景和功能是有所不同的。OpenCV主要用于图像处理和计算机视觉领域,而PCL则主要用于点云处理和三维重建领域。
针对移动式三维视觉测量系统所采用的圆形标记点成像亮度较低且不均匀等问题,提出了一种基于灰度差重心法的识别与提取算法。获取标记点近似成像中心及成像区域,在成像区域内沿四个方向扫描得到像素级边缘点;利用...
但当系统采集空间三维信息时,由于航位推算方法的误差积累,会造成较大的系统定位误差,严重影响最终的测绘精度。针对此问题,提出了利用同步定位及地图创建(SLAM)的算法对系统进行位姿矫正。从激光点云中提取出准确...
态物体的三维检测,但是激光雷达产生的点云(Point Cloud)只有位置信息,细节信。抗干扰能力非常强,但是因为毫米波雷达发射的波束量有限,导致接受的信号量很少,其中,相机可以提供车身周围丰富的色彩信息,帮助...
为了快速准确标定线激光人体三维扫描仪,提出一种使用精密移动陶瓷量块标定靶的多传感器同步标定方法。利用线激光在陶瓷量块4个方向产生的V形光带顶点作为标定点,由位于扫描仪4个立轴上的8个CCD相机同时记录V形光带...

在时空二值编码结构光三维成像系统中,一个投影仪像素通常与摄像机图像坐标系的多个像素对应。为提高系统的测量精度及数据密度,提出了一种适用于时空二值编码结构光三维成像系统的摄像机与投影仪图像亚像素匹配方法...
本发明为双目立体视觉的三维重建方法,属于图像处理与机器视觉领域,涉及halcon软件,具体涉及空间场景的三维重建。背景技术:三维重建技术作为计算机视觉领域的一个重要分支,在人工智能、虚拟现实、非接触无损检测...
在处理三维点云时,很多场景都需要对点云数据进行拟合,以求出一些特征,例如平面、球体、柱体等等。其中distance_threshold参数指定了点云到直线距离的最大值,ransac_n参数指定了随机采样的点数,num_iterations...
空间圆拟合(Spatial Circle Fitting)是一个用于拟合三维空间中的圆的数学和计算机视觉技术。
为了在三维点云中拟合出一个圆,我们可以使用PCL(Point Cloud Library)库中的RANSAC(Random Sample Consensus,随机采样一致性)算法。在每次迭代中,我们随机选择三个点作为一组样本,然后根据这些样本估计出圆...
上一回我们介绍了点云的基本概念,然后介绍了不同感知源头获取到数据的各种特征,之后是处理点云数据的一些主流方法,今天开始正式进入传统数学方法的研究下面正式开始介绍提示:今天学习的PCA,是除了深度学习之外...

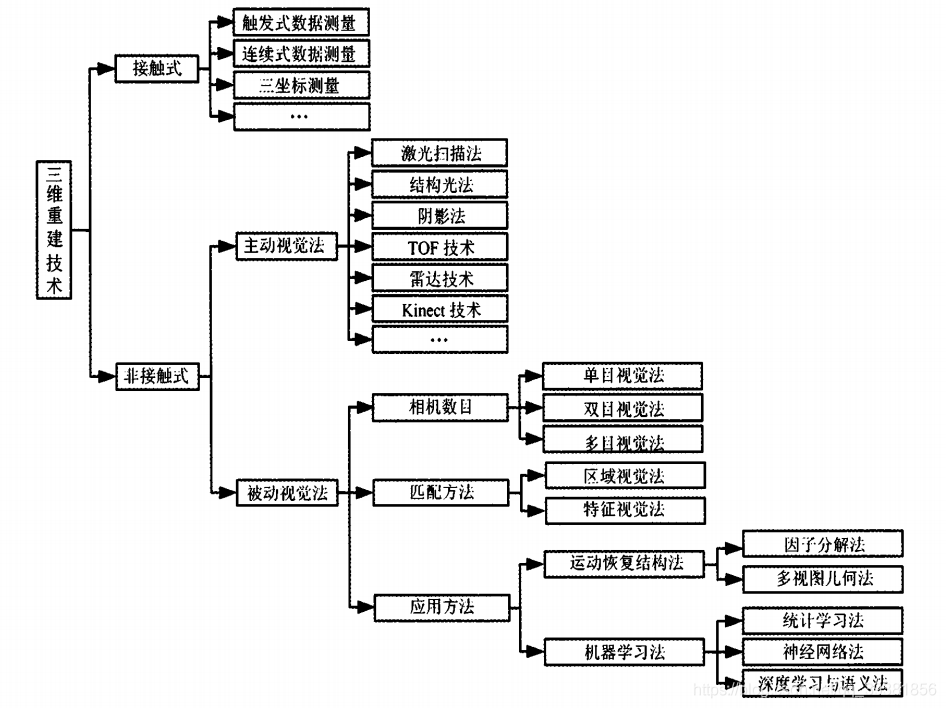
基于计算机视觉的三维重建技术,是指利用二幅或多幅二维图像来恢复空间物体表面的几何信息,其过程是成像过程的逆过程[1]。在三维重建发展的早期,受到计算处理能力的限制和理论研究水平的限制,真实物体的建模需要...
基于三维激光点云的目标识别与跟踪研究 人工智能技术与咨询 来源:《汽车工程》,作者徐国艳等 [摘要]针对无人车环境感知中的障碍物检测问题,设计了一套基于车载激光雷达的目标识别与跟踪方法。为降低计算...

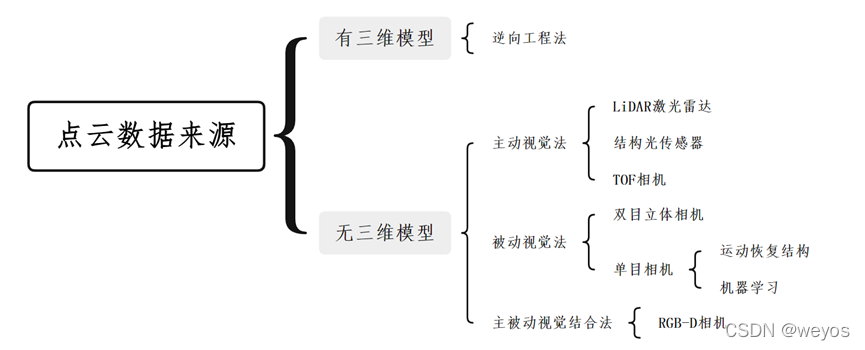
点击上方“3D视觉工坊”,选择“星标”干货第一时间送达这是一篇综述性论文,以下只做概述性介绍,介绍文章已共享在微信群和免费知识星球中,文章在公众号将分成三个部分:第一部分介绍点云的获取以...




推荐文章
- 记录nvm use node.js版本失败,出现报错: exit status 1: ��û���㹻��Ȩ��ִ�д˲�����_nvm use失败-程序员宅基地
- lua面向对象编程之点号与冒号的差异详细比较-程序员宅基地
- 百度云虚假下载_虚假新闻:关于公共云的5种常见误解-程序员宅基地
- Tesseract图像识别OCR的学习1_tesseract doocr-程序员宅基地
- 不同层级的Android开发者的不同行为,我们该如何进阶和规划?-程序员宅基地
- Pelee: A real-time object detection system on mobile devices-程序员宅基地
- Hadoop环境搭建(保姆级教学)_hadoop平台搭建步骤-程序员宅基地
- ZooKeeper实战之ZkClient客户端实现负载均衡_zookeeper实现负载均衡案例-程序员宅基地
- Android 枚举 VS 枚举注解_android 枚举注解-程序员宅基地
- HDU1715--第i个斐波那契数 大菲波数_返回第i个斐波那契数-程序员宅基地